자율터널탐사로봇 ATE
 |
자율터널탐사(Autonomous Tunnel Exploitation·ATE)로봇은 위성위치확인시스템(GPS) 신호가 없는 자연 동굴이나 내부에 대한 사전 정보가 없는 인공의 위험시설에서 초기 탐사·정찰 임무를 수행하고, 재난 시에는 붕괴된 건물 등에서 사람 탐사와 물체탐지의 역할을 수행하는 로봇이다.
국방과학연구소(ADD)는 로봇을 이용해 지형정보가 없는 지역을 탐사하고, 위험을 탐지하며, 탐사 지역의 3차원 지도를 생성할 수 있는 ‘자율터널탐사기술’을 연구할 목적으로 제작되었다.
ADD는 2020년 8월 충남 태안군 소재 안흥종합시험장에서, 2021년 9월 26일 무인이동체산업엑스포에서, 2021년 10월 서울국제항공우주 및 방위산업전시전(서울 ADEX) 등에서 이 ATE 로봇 시제를 소개한 바 있다.
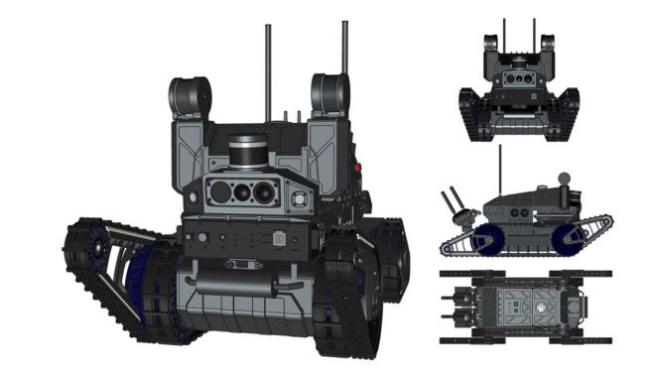 |
ATE로봇은 길이 1m, 폭 0.68m, 높이 0.75m의 소형 크기로 무게는 140kg이며 최대 10km/h로 기동한다.
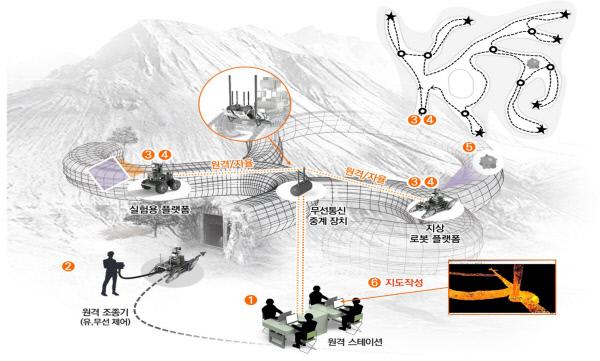
스스로 해당 지역을 주행/탐사하면서 다수의 로봇 정보를 융합하여 3차원 지도를 생성하고, 사전에 알려준 관심 물체를 탐지/인지하며, 통신 가능 영역 확장을 위하여 전략적인 위치에 통신 중계기 자동 전개하는 기능을 포함하고 있다.
 |
이를 위해 자연동굴 및 재난지역 등과 같은 다양한 환경에서 빠른 기동과 원활한 장애물 회피를 위해 상황·환경에 따라 트랙과 휠로 교체할 수 있는 구동 시스템을 적용하고 라이다(LiDAR·LIght Detection And Rang 레이저를 이용해 주변 모습을 정밀하게 그려내는 장치), CMOS이미지센서와 같은 다양한 센서를 사용한다.
또한 공간맵핑(SLAM) 및 지도작성 기술, 심층 강화학습 기반 자율 탐사 기술, 심층 신경망기반 인식기술, 공통 하드웨어/소프트웨어(HW/SW) 아키텍처 기술 등 다양한 첨단 기술들이 적용되었다.
 |
한편, 국방과학연구소는 2022년 6월 21일 이 ATE기술을 확보했다고 밝혔다. ADD는 2019년부터 2022년까지 미국 지상군 차량체계 연구소(GVSC, Ground Vehicle System Center)와의 국제공동연구를 통해 ‘자율터널탐사(ATE:Autonomous Tunnel Exploration) 기술’을 확보했다고 밝혔다.
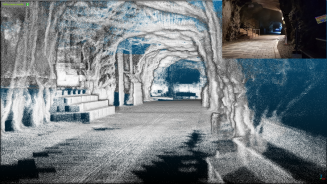
발표에 따르면, ADD는 약 1.5km 길이의 실제 동굴에서 이 로봇을 통해 수행한 시험에서 다양한 형태의 위험물체 인식과 오염지역 탐지, 수 cm급 해상도의 3차원 지도 생성에 성공함으로써, ATE 개발기술의 성능을 확인했다.
 |
 |
이 기술은 GPS 신호의 수신이 불가능한 동굴, 지하시설 등에서도 사전정보 없이 로봇의 자율주행 및 탐사를 가능하게 함으로써 기존 기술을 획기적으로 발전시킨 것으로 평가받고 있다.
한-미 양국은 개발과정에서 향후 미래 로봇기반의 연합작전 능력 배양을 위한 협력을 고려해 양국 로봇에 공통의 미들웨어(로봇 운영 처리 소프트웨어), 인터페이스, 그리고 데이터 형식을 적용했으며, 양국 로봇 기술의 시너지를 위해 로봇 하드웨어 및 소프트웨어는 양국에서 독자적으로 개발했다.
특히 ADD는 자체 연구개발을 통해 기능과 임무에 따라 형상을 바꿀 수 있는 모듈화된 로봇을 설계/제작하고, 독자 개발한 최신 AI기술 기반의 인식, 판단, 탐사 소프트웨어를 로봇에 탑재했다.
또한 조작 및 운용 측면에서는 휴대폰이나 태블릿에서 원격 조종이 가능하게 해 한명의 운용자가 여러 대의 로봇을 동시에 운용가능하게 했다.
** 2022년 6월 21일 업데이트
오늘의 뉴스
Hot Photo News
많이 본 기사
이 기사를 스크랩 하시겠습니까?
자율터널탐사로봇 ATE
신인호
| |
자율터널탐사(Autonomous Tunnel Exploitation·ATE)로봇은 위성위치확인시스템(GPS) 신호가 없는 자연 동굴이나 내부에 대한 사전 정보가 없는 인공의 위험시설에서 초기 탐사·정찰 임무를 수행하고, 재난 시에는 붕괴된 건물 등에서 사람 탐사와 물체탐지의 역할을 수행하는 로봇이다.
국방과학연구소(ADD)는 로봇을 이용해 지형정보가 없는 지역을 탐사하고, 위험을 탐지하며, 탐사 지역의 3차원 지도를 생성할 수 있는 ‘자율터널탐사기술’을 연구할 목적으로 제작되었다.
ADD는 2020년 8월 충남 태안군 소재 안흥종합시험장에서, 2021년 9월 26일 무인이동체산업엑스포에서, 2021년 10월 서울국제항공우주 및 방위산업전시전(서울 ADEX) 등에서 이 ATE 로봇 시제를 소개한 바 있다.
| |
ATE로봇은 길이 1m, 폭 0.68m, 높이 0.75m의 소형 크기로 무게는 140kg이며 최대 10km/h로 기동한다.
스스로 해당 지역을 주행/탐사하면서 다수의 로봇 정보를 융합하여 3차원 지도를 생성하고, 사전에 알려준 관심 물체를 탐지/인지하며, 통신 가능 영역 확장을 위하여 전략적인 위치에 통신 중계기 자동 전개하는 기능을 포함하고 있다.
| |
이를 위해 자연동굴 및 재난지역 등과 같은 다양한 환경에서 빠른 기동과 원활한 장애물 회피를 위해 상황·환경에 따라 트랙과 휠로 교체할 수 있는 구동 시스템을 적용하고 라이다(LiDAR·LIght Detection And Rang 레이저를 이용해 주변 모습을 정밀하게 그려내는 장치), CMOS이미지센서와 같은 다양한 센서를 사용한다.
또한 공간맵핑(SLAM) 및 지도작성 기술, 심층 강화학습 기반 자율 탐사 기술, 심층 신경망기반 인식기술, 공통 하드웨어/소프트웨어(HW/SW) 아키텍처 기술 등 다양한 첨단 기술들이 적용되었다.
| |
한편, 국방과학연구소는 2022년 6월 21일 이 ATE기술을 확보했다고 밝혔다. ADD는 2019년부터 2022년까지 미국 지상군 차량체계 연구소(GVSC, Ground Vehicle System Center)와의 국제공동연구를 통해 ‘자율터널탐사(ATE:Autonomous Tunnel Exploration) 기술’을 확보했다고 밝혔다.
발표에 따르면, ADD는 약 1.5km 길이의 실제 동굴에서 이 로봇을 통해 수행한 시험에서 다양한 형태의 위험물체 인식과 오염지역 탐지, 수 cm급 해상도의 3차원 지도 생성에 성공함으로써, ATE 개발기술의 성능을 확인했다.
| |
| |
이 기술은 GPS 신호의 수신이 불가능한 동굴, 지하시설 등에서도 사전정보 없이 로봇의 자율주행 및 탐사를 가능하게 함으로써 기존 기술을 획기적으로 발전시킨 것으로 평가받고 있다.
한-미 양국은 개발과정에서 향후 미래 로봇기반의 연합작전 능력 배양을 위한 협력을 고려해 양국 로봇에 공통의 미들웨어(로봇 운영 처리 소프트웨어), 인터페이스, 그리고 데이터 형식을 적용했으며, 양국 로봇 기술의 시너지를 위해 로봇 하드웨어 및 소프트웨어는 양국에서 독자적으로 개발했다.
특히 ADD는 자체 연구개발을 통해 기능과 임무에 따라 형상을 바꿀 수 있는 모듈화된 로봇을 설계/제작하고, 독자 개발한 최신 AI기술 기반의 인식, 판단, 탐사 소프트웨어를 로봇에 탑재했다.
또한 조작 및 운용 측면에서는 휴대폰이나 태블릿에서 원격 조종이 가능하게 해 한명의 운용자가 여러 대의 로봇을 동시에 운용가능하게 했다.
** 2022년 6월 21일 업데이트